La science dans le domaine de l'électricité aux XIXe et XXe siècles s'est développée rapidement, ce qui a conduit à la création de moteurs électriques à induction. Avec l'aide de tels dispositifs, le développement de l'industrie industrielle a fait un grand pas en avant et il est désormais impossible d'imaginer des usines et des usines sans machines électriques utilisant des moteurs électriques asynchrones.
Contenu
Histoire d'apparition
L'histoire de la création d'un moteur électrique asynchrone commence en 1888, lorsque Nicolas Tesla breveté un circuit de moteur électrique, la même année un autre scientifique dans le domaine de l'électrotechnique Gallileo Ferraris a publié un article sur les aspects théoriques du fonctionnement d'une machine asynchrone.
En 1889, le physicien russe Mikhaïl Osipovitch Dolivo-Dobrovolsky a reçu un brevet en Allemagne pour un moteur électrique triphasé asynchrone.

Toutes ces inventions ont permis d'améliorer les machines électriques et ont conduit à l'utilisation massive de machines électriques dans l'industrie, ce qui a considérablement accéléré tous les processus technologiques de production, augmenté l'efficacité du travail et réduit son intensité de travail.
À l'heure actuelle, le moteur électrique le plus couramment utilisé dans l'industrie est le prototype d'une machine électrique créée par Dolivo-Dobrovolsky.
Le dispositif et le principe de fonctionnement d'un moteur asynchrone
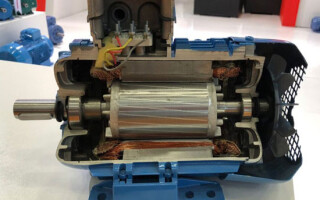
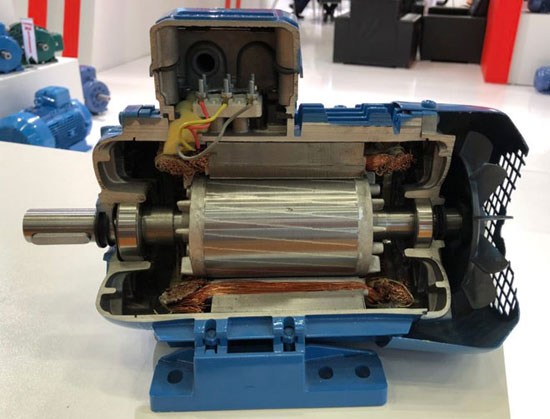
Les principaux composants d'un moteur à induction sont le stator et le rotor, qui sont séparés l'un de l'autre par un entrefer. Le travail actif dans le moteur est effectué par les enroulements et le noyau du rotor.
L'asynchronisme du moteur s'entend comme la différence entre la vitesse du rotor et la fréquence de rotation du champ électromagnétique.
stator - il s'agit d'une partie fixe du moteur dont le noyau est en acier électrique et monté dans le châssis. Le lit est fabriqué de manière moulée à partir d'un matériau non magnétique (fonte, aluminium). Les enroulements du stator sont un système triphasé dans lequel les fils sont posés dans des rainures avec un angle de déviation de 120 degrés. Les phases des enroulements sont classiquement connectées au réseau selon les schémas "étoile" ou "triangle".

Rotor C'est la partie mobile du moteur. Les rotors des moteurs électriques asynchrones sont de deux types : à cage d'écureuil et à phase. Ces types diffèrent les uns des autres par la conception de l'enroulement du rotor.
Moteur asynchrone à cage d'écureuil
Ce type de machine électrique a d'abord été breveté par M.O. Dolivo-Dobrovolsky et est communément appelé "roue d'écureuil" en raison de l'apparence de la structure. L'enroulement du rotor court-circuité est constitué de tiges de cuivre court-circuitées avec des anneaux (aluminium, laiton) et inséré dans les rainures de l'enroulement du noyau du rotor. Ce type de rotor n'a pas de contacts mobiles, ces moteurs sont donc très fiables et durables en fonctionnement.
Moteur à induction avec rotor de phase
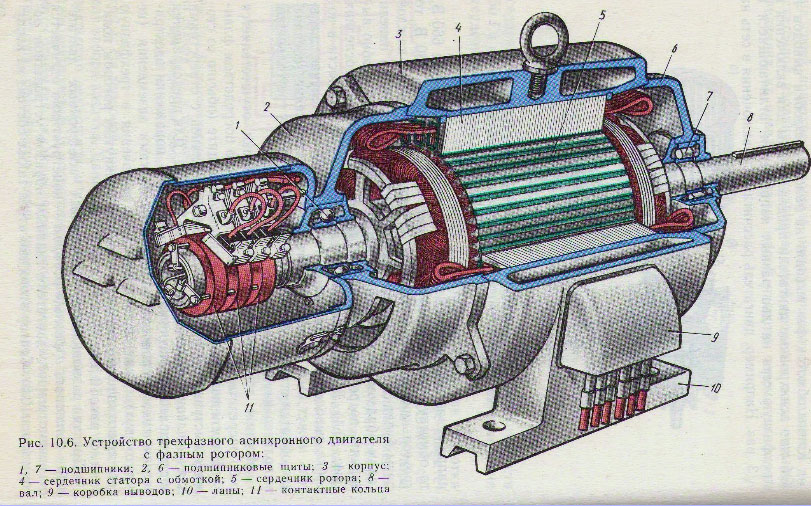
Un tel appareil vous permet de régler la vitesse de travail dans une large plage. Le rotor de phase est un enroulement triphasé, qui est connecté selon les schémas "étoile" ou triangle. Dans ces moteurs électriques, il existe des brosses spéciales dans la conception, avec lesquelles vous pouvez régler la vitesse du rotor. Si un rhéostat spécial est ajouté au mécanisme d'un tel moteur, lors du démarrage du moteur, la résistance active diminuera et ainsi les courants de démarrage diminueront, ce qui affectera négativement le réseau électrique et l'appareil lui-même.
Principe de fonctionnement
Lorsqu'un courant électrique est appliqué aux enroulements du stator, un flux magnétique se produit. Étant donné que les phases sont décalées les unes par rapport aux autres de 120 degrés, à cause de cela, le flux dans les enroulements tourne. Si le rotor est court-circuité, alors avec une telle rotation, un courant apparaît dans le rotor, ce qui crée un champ électromagnétique. Interagissant l'un avec l'autre, les champs magnétiques du rotor et du stator font tourner le rotor du moteur électrique. Si le rotor est en phase, alors une tension est appliquée simultanément au stator et au rotor, un champ magnétique apparaît dans chaque mécanisme, ils interagissent entre eux et font tourner le rotor.
Avantages des moteurs asynchrones
| avec rotor à cage d'écureuil | Avec rotor de phase |
|---|---|
| 1. Dispositif simple et circuit de lancement | 1. Petit courant de démarrage |
| 2. Faible coût de fabrication | 2. Possibilité de régler la vitesse de rotation |
| 3. Avec l'augmentation de la charge, la vitesse de l'arbre ne change pas | 3. Travailler avec de petites surcharges sans changer la vitesse |
| 4. Capable de résister aux surcharges à court terme | 4. Le démarrage automatique peut être appliqué |
| 5. Fonctionnement fiable et durable | 5. A un grand couple |
| 6. Convient à toutes les conditions de travail | |
| 7. A un rendement élevé |
Inconvénients des moteurs asynchrones
| avec rotor à cage d'écureuil | Avec rotor de phase |
|---|---|
| 1. La vitesse du rotor n'est pas réglable | 1. Grandes dimensions |
| 2. Petit couple de démarrage | 2. L'efficacité est inférieure |
| 3. Courant de démarrage élevé | 3. Entretien fréquent dû à l'usure des balais |
| 4. Une certaine complexité de conception et la présence de contacts mobiles |
Les moteurs asynchrones sont des appareils très performants avec d'excellentes caractéristiques mécaniques, ce qui en fait des leaders en fréquence d'utilisation.
Modes de fonctionnement

Un moteur électrique de type asynchrone est un mécanisme universel et possède plusieurs modes pendant la durée de fonctionnement :
- Continu;
- court terme;
- Périodique;
- Répété à court terme ;
- Spécial.
Mode continu - le mode de fonctionnement principal des appareils asynchrones, qui se caractérise par le fonctionnement constant du moteur électrique sans arrêts à charge constante. Ce mode de fonctionnement est le plus courant, utilisé partout dans les entreprises industrielles.
Mode momentané - fonctionne jusqu'à ce qu'une charge constante soit atteinte pendant un certain temps (10 à 90 minutes), n'ayant pas le temps de s'échauffer le plus possible. Après cela, il s'éteint. Ce mode est utilisé lors de la fourniture de substances de travail (eau, pétrole, gaz) et d'autres situations.
Mode périodique - la durée de travail a une certaine valeur et est désactivée à la fin du cycle de travail. Mode de fonctionnement démarrage-travail-arrêt. En même temps, il peut s'éteindre pendant un certain temps pendant lequel il n'a pas le temps de se refroidir aux températures extérieures et de se rallumer.
Mode intermittent - le moteur ne chauffe pas au maximum, mais n'a pas non plus le temps de se refroidir à la température extérieure. Il est utilisé dans les ascenseurs, escaliers mécaniques et autres appareils.
régime spécial - la durée et la période d'inclusion sont arbitraires.
En génie électrique, il existe un principe de réversibilité des machines électriques - cela signifie que l'appareil peut à la fois convertir l'énergie électrique en énergie mécanique et effectuer les actions opposées.
Les moteurs électriques asynchrones répondent également à ce principe et ont un mode de fonctionnement moteur et générateur.
Mode moteur - le mode de fonctionnement principal d'un moteur électrique asynchrone. Lorsque la tension est appliquée aux enroulements, un couple électromagnétique apparaît, entraînant le rotor avec l'arbre, et ainsi l'arbre commence à tourner, le moteur atteint une vitesse constante, effectuant un travail utile.
mode générateur - basé sur le principe de l'excitation du courant électrique dans les bobinages du moteur lors de la rotation du rotor. Si le rotor du moteur tourne mécaniquement, une force électromotrice se forme sur les enroulements du stator, en présence d'un condensateur dans les enroulements, un courant capacitif se produit.Si la capacité du condensateur est d'une certaine valeur, en fonction des caractéristiques du moteur, le générateur s'auto-excitera et un système de tension triphasé apparaîtra. Ainsi, le moteur à cage d'écureuil fonctionnera comme un générateur.
Contrôle de vitesse des moteurs asynchrones
Pour réguler la vitesse de rotation des moteurs électriques asynchrones et contrôler leurs modes de fonctionnement, il existe les méthodes suivantes :
- Fréquence - lorsque la fréquence du courant dans le réseau électrique change, la fréquence de rotation du moteur électrique change. Pour cette méthode, un dispositif appelé convertisseur de fréquence est utilisé ;
- Rhéostatique - lorsque la résistance du rhéostat dans le rotor change, la vitesse de rotation change. Cette méthode augmente le couple de démarrage et le glissement critique ;
- Pulse - une méthode de contrôle dans laquelle un type spécial de tension est appliqué au moteur.
- Commutation des enroulements pendant le fonctionnement du moteur électrique du circuit «étoile» au circuit «triangle», ce qui réduit les courants de démarrage;
- Commande de changement de paire de pôles pour les rotors à cage d'écureuil ;
- Connexion de réactance inductive pour moteurs à rotor bobiné.
Avec le développement des systèmes électroniques, le contrôle des différents moteurs électriques de type asynchrone devient de plus en plus efficace et précis. De tels moteurs sont utilisés partout dans le monde, la variété des tâches effectuées par de tels mécanismes augmente chaque jour et leur besoin ne diminue pas.
Articles similaires :